Экзоскелет коленного сустава картинки

Ïåðâûé ïîñò òóò. Áóäåì ïðîáîâàòü .
 ýòîé èíñòðóêöèè ÿ ïîøàãîâî îïèøó êàê ñäåëàòü î÷åíü ïðîñòîé, íî áîëåå-ìåíåå ôóíêöèîíàëüíûé ýêçîñêåëåò íà ïíåâìàòèêå (PG-08-EF). Âñå õàðàêòåðèñòèêè è ïàðàìåòðû âàðüèðóåìûå è ìîãóò áûòü èçìåíåíû êàê êîìó íóæíî.
Ýòà ìîäåëü ðàçðàáàòûâàëàñü äîâîëüíî äîëãî, íî â èòîãå ïîëó÷èëàñü î÷åíü äàæå íåïëîõîé. Îòëè÷èòåëüíîé å¸ ÷åðòîé ÿâëÿåòñÿ òî ÷òî îíà èçíà÷àëüíî ðàçðàáàòûâàëàñü äëÿ ïîëåâûõ óñëîâèé ñ î÷åíü ìàëûì íàáîðîì èíñòðóìåíòîâ è âîçìîæíîñòüþ áûñòðîãî ðåìîíòà. Íà äàííûé ìîìåíò âåäåòñÿ ïîèñê íîâûõ ðåøåíèé â ðàìêàõ ýòîé æå êîíöåïöèè.
Èç ýëåêòðè÷åñêîãî èíñòðóìåíòà íàì ïîíàäîáèòñÿ äðåëü è «áîëãàðêà». Íî åñëè áîëãàðêè íåò íå áåäà, ïèëèòü òàì ìàëî è âïîëíå ìîæíî îáîéòèñü ðó÷íîé íîæîâêîé ïî ìåòàëëó.
Ñâàðêà íå íóæíà.
1. Íîãè
Äëÿ íà÷àëà íóæíî ïðèêóïèòü êîìïîíåíòû. Âñå êîìïîíåíòû ìîæíî âçÿòü â ïðàêòè÷åñêè â ëþáîì ñòðîèòåëüíîì ìàãàçèíå.
Íàì ïîíàäîáèòñÿ:
2 êðåïåæíûõ óãîëêà KUAS 50õ90õ55 ìì (ïÿòêè)
8 ìåõàíèçìîâ ïîäúåìà äâåðè Jet 100N MR203B.100Nl99 (ïî 2 íà êîëåíî è íà áåäðî)
2 ìåòðà àëþìèíèåâîãî ïðîôèëÿ 25õ25õ1.5 (åñëè äåëàòü ðàçäâèæíîé êàðêàñ íîã) èëè æå 2 ìåòðà àëþìèíèåâîãî ïðîôèëÿ 40õ20õ2 (åñëè äåëàòü áîëåå ïðî÷íûì)
2 äâåðíîé ïðóæèíû 30 ìì (äëÿ âûïðÿìëåíèÿ êîëåí)
50 ñì øëåéôîâ ïîðòôåëüíûõ (5 ñì)
2 ïîðòôåëüíûõ çàìêà (5 ñì)
40 ñì àëþìèíèåâîãî ïðîôèëÿ 25õ25õ1.5 (íà êîëåíè)
Áîëòû, ãàéêè è øàéáû íà 6 ìì. Ëó÷øå âçÿòü ìíîãî ïî 6 ñì â äëèíó è òàì ïîäïèëèâàòü ïîä íóæíîå. Äëÿ âñåãî ñêåëåòà õâàòèò ïî 60 øò. âñåãî ýòîãî.
Ñàìûì ïåðâûì øàãîì øàãîì ïèëèì ïðîôèëü ïîä äëèíó íîã.  ìîåì ñëó÷àå ýòî î÷åíü óäîáíî ïîëó÷àåòñÿ êàê ðàç ïî 50 ñì, íî êàæäîìó íóæíî áóäåò ïîäîãíàòü ýòó äëèíó ïîä ñåáÿ. Íóæíî èçìåðèòü 2 ïðîìåæóòêà îò ïÿòêè äî êîëåíà è îò êîëåíà.
Ò.å. íà 2 íîãè äîëæíî áûòü íàïèëåíî 4 êóñêà ïðîôèëÿ (25õ25õ1.5 èëè 40õ20õ2).
Áåðåì óãîëêè (KUAS 50õ90õ55) è ïðîñâåðëèâ ñîîòâåòñòâóþùèå îòâåðñòèÿ â ïðîôèëå è êðåïèì íà 6 ìì áîëòû. Íå çàáûâàåì ïðî øàéáû. Äîëæíî áûòü ÷òî-òî òèïà âîò òàêîãî.
Äàëåå èùåì ðåçèíó èëè ÷òî-òî ïîõîæåå. ß ðåêîìåíäóþ íàéòè ñòàðûé ìàøèííûé êîâðèê è ïóñòèòü åãî.
Ñäåëàâ êàê ïîêàçàíî íà ôîòî ýêçîñêåëåò íå áóäåò ñêîëüçèòü è äðåáåçæàòü ìåòàëëîì ïðè õîäüáå.

Ìîæíî äîáàâèòü øëåéô è ïîëóêîëüöî äëÿ çàêðåïëåíèÿ íîãè. Ïðèìåðíî íà óðîâíå ëîäûæêè. Íà ñàìîì âåðõíåì ôîòî ïîêàçàíî ãäå ëó÷øå âñåãî ýòî ïðèêðåïèòü, íî âñ¸, êàê íàïèñàíî âûøå, ïîäãîíÿåòñÿ ïîä êàæäîãî. Êðåïèòñÿ òàêæå íà 6 ìì áîëòû.
Òåïåðü ïðèñòóïàåì ê êîëåíÿì.
Áåðåì ìåõàíèçìû ïîäúåìà äâåðè è âòîðîé êóñîê ïðîôèëÿ. Ïðèìåðÿåì, ñâåðëèì è êðåïèì. Êðåïèì íàñêâîçü ïðîäåòûì áîëòîì ñðàçó ïî 2 ìåõàíèçìà.
Âîçìîæíî ìåõàíèçìû ïîäúåìà ïðèäåòñÿ ñíà÷àëà ðàçîáðàòü è âûòàùèòü èç íèõ ñòîïîðû, íî îíè óñòàíîâëåíû íå âñåãäà.
Äîëæíî áûòü ÷òî òî òèïà âîò òàêîãî.

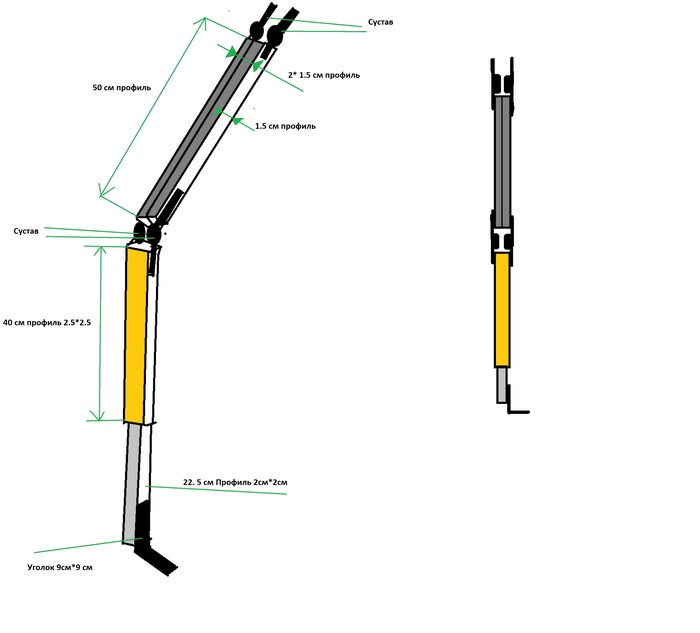
Áåðåì êóñîê àëþìèíèåâîãî ïðîôèëÿ 25*25 äëèííîé 40 ñì è ïèëèì åãî ïîïîëàì. Ñïèëèâàåì ñ êàæäîãî êóñêà îäíó èç ãðàíåé. Ýòîò ýëåìåíò íå äàñò êîëåíó âûãíóòüñÿ â îáðàòíîì íàïðàâëåíèè. Ïðèìåðÿåì ÷òîáû ýòîò ýëåìåíò áûë ïðèìåðíî ïî ñåðåäèíå. Ñâåðëèì â 4 ìåñòàõ ïðèìåðíî ñ øàãàì â 5-7 ñì è êðåïèì ê êàðêàñó êàê íà ôîòîãðàôèè (÷åðíîå ñâåðõó ýòî êàê ðàç ýòîò ýëåìåíò).  ïðîïèëåííóþ ãðàíü óñòàíàâëèâàåì ïðóæèíó. Ñâåðëèì è êðåïèì áîëòàìè ñ ãàéêàìè.

 îáùåì òî íîãè ãîòîâû.Áåäðåííûé ñóñòàâ áóäåò óñòàíîâëåí êîãäà áóäåò ãîòîâî óæå âñ¸ îñòàëüíîå.
Òàêæå âîçìîæíî ñäåëàòü ÷òîáû íîãè áûëè ðàçäâèæíûìè ýòî äàñò áîëåå òî÷íûé ïîäãîí ïîä ñåáÿ áåç ïåðåïèëîê êàðêàñà.
Äëÿ ýòîãî ïÿòî÷íûé óãîëîê ìû êðåïèì ê êóñêó ïðîôèëÿ 20*20 ìì è äëèíîé 20 ñì. Ñâåðëèì ïî âñåé åãî ÷åðåç êàæäûå 3 ñì îòâåðñòèÿ 7ìì.
 íèæíåé ÷àñòè êàðêàñà íîãè òàêæå ñâåðëèì îòâåðñòèÿ êàæäûå 3 ñì. 6-7 îòâåðñòèé âïîëíå äîñòàòî÷íî. Âñòàâëÿåì îäíó ÷àñòü â äðóãóþ.

Ïîòîì â 2 ìåñòàõ ïðîøèâàåì ýòîò ó÷àñòîê áîëòàìè ñ áàðàøêàìè è ïîäáèðàåì íóæíóþ äëèíó.

È âîò òàê.

Ìîæíî âîò òàê çàïðÿòàòü ïðóæèíû. Òàê îíè âûãëÿäèò çíà÷èòåëüíî ëó÷øå è ìåíüøå âåðîÿòíîñòü ÷òî â íèõ ñëó÷àéíî ÷òî òî ïîïàäåò.

Âîò ïðèìåðíî òàêîå äîëæíî ïîëó÷èòñÿ â êîíöå.
Äëÿ òåõ êòî â òàíêå ñõåìà. Ïðàâäà òóò íåñêîëüêî èíûå ðàçìåðû ( è âîîáùå èñïîëüçîâàí óäâîåííûé ïðîôèëü) è ýòî ñõåìà íîãè ñ âîçìîæíîñòüþ èçìåíÿòü äëèíó, íî äëÿ îáùåãî ïîíèìàíèÿ ïîéäåò.
2. Ñïèíà è ïëå÷è
Ýòîò ýëåìåíò óæå ñëîæíåé. Íà êàðêàñ ñïèíû êðåïÿòñÿ ðóêè è âñÿ ïíåâìàòèêà.
Äëÿ ñïèíû íàì ïîíàäîáèòñÿ ñëåäóþùåå:
2 îïîðû øàðîâàÿ /lemforder (ïëå÷è)
2 ìåòðà àëþìèíèåâîãî ïðîôèëÿ 20*20*1 ìì
1 ìåòð ñòðîèòåëüíîé (ðåçüáîâîé) øïèëüêè íà 8 èëè 10 ìì
1 ìåòð àëþìèíèåâîãî óãîëêà 20*25
1 ìåòð àëþìèíèåâîãî ïðîôèëÿ 25*25*1 ìì
2 ìåòð àëþìèíèåâîãî ïðîôèëÿ 15*15*1 ìì (áóäåò ïîïèëåí íà áåäðà)
2 ñòàëüíûõ óãîëêà 40*40 ìì
2 ñòàëüíûõ óãîëêà 150*50
Ëèñò æåñòè èëè æå ÏÝÒà 1 êâ. ìåòð (îáøèâêà)
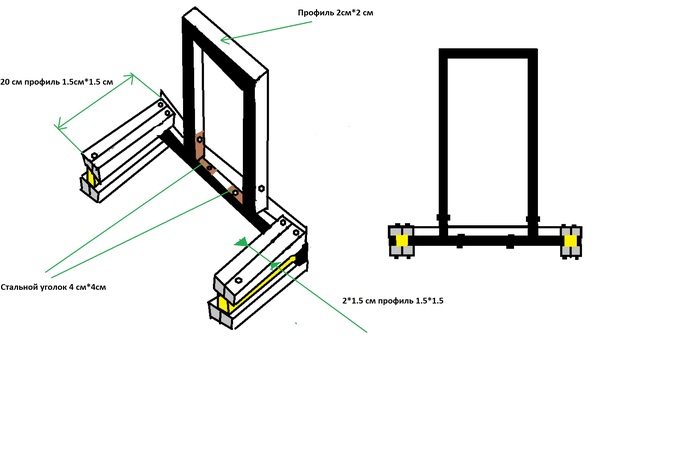
Ñõåìà òîãî ÷òî áóäåì ñîáèðàòü.
Îòïèëèâàåì 1 ìåòð ïðîôèëÿ 20*20 è îòìåðÿåì ïî 40 ñì ñ äâóõ ñòîðîí.
Îòìåðÿåì (â 40 ñì ñ êàæäîé ñòîðîíû) íåîáõîäèìûå äëÿ èçãèáà ïðîðåçè â 2 ñì ñ 2 ñòîðîí. Âûïèëèâàåì è ñãèáàåì. Äîëæíî áûòü êàê íà ôîòî, ò.å. áîëüøàÿ âûòÿíóòàÿ áóêâà «Ï» ñî ñòîðîíàìè 40-20-40 ñì.
Äàëåå îòïèëèâàåì åùå îäèí êóñîê ïðîôèëÿ 20*20 äëèíîé 40 ñì è êóñîê óãîëêà 25*20 òàêæå 40 ñì.

Òåïåðü íóæíî ñîåäåíèòü ýòè ýëåìåíòû ñ ïîìîùüþ ñòàëüíûõ óãîëêîâ 40*40 ìì.
Óãîëîê ïîâåðíóò ðåáðîì 20 ìì âíèç. Ïîä íèì çàêðåïëÿåì ïðîôèëü 20*20*400 ìì. Çàêðåïëÿåòñÿ âñ¸ ýòî áîëòàìè, êîòîðûå ïðîõîäÿò ÷åðåç óãîëêè.

Îòìåðÿåì ïåðâûé êóñîê æåñòè è óñòàíàâëèâàåì åãî â çàäíåþ ÷àñòü ñïèíû. Ïðèìåðíî 40*20 ñì. Ñâåðëèì è ïðîøèâàåì âñ¸ ýòî áîëòàìè ïðèìåðíî ÷åðåç êàæäûå 10-15 ñì, íî âàæíî ÷òîáû ïîñëåäíèå áîëòû ïðîøèëè íèæíèé óãîëîê è Ï îáðàçíûé ýëåìåíò.
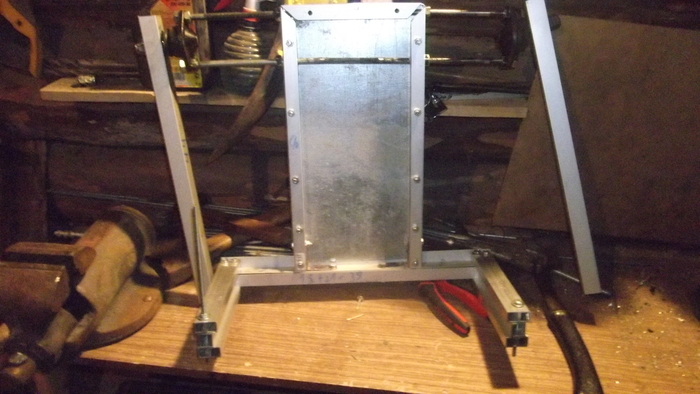
 èòîãå ó íàñ äîëæíî ïîëó÷èòñÿ ÷òî òèïà âîò òàêîãî. Ðàçâå ÷òî ïî áîêàì ïîêà íè÷åãî íå äîëæíî áûòü.

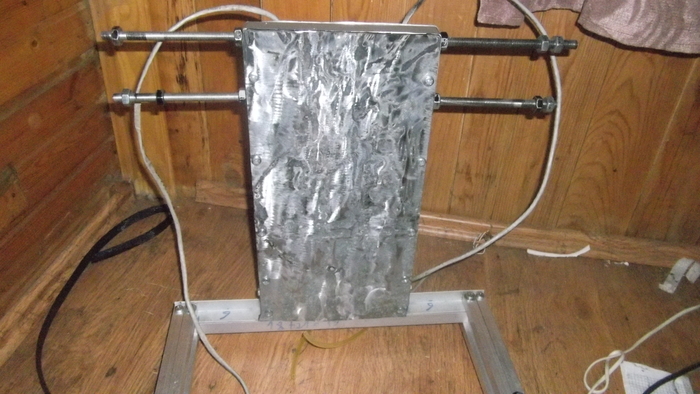
Òåïåðü íóæíî ñäåëàòü ïëå÷è è ìåñòî äëÿ óñòàíîâêè ïðèâîäîâ. Äëÿ ýòîãî íàì ïîíàäîáèòñÿ øïèëüêè è ïàëüöåâûå îïîðû. Ïåðâûì äåëîì ñâåðëèì íà ðàññòîÿíèè 10 ñì 2 îòâåðñòèÿ íà 1 ìì øèðå ïîäãîòîâëåííîé øïèëüêè.  èäåàëå âåðõíåå îòâåðñòèå äîëæíî ïðîõîäèòü ÷åðåç âñþ äëèíó ïðîôèëÿ ñâåðõó. Ïðÿìî êàê íà ôîòî.
Ðàñïèëèâàåì øïèëüêó ïîïîëàì ò.å. íà êóñêè ïî 50 ñì. Ïðîäåâàåì ÷åðåç îòâåðñòèÿ è çàòÿãèâàåì ãàéêàìè äàáû òîð÷àëî â ðàçíûå ñòîðîíû ïî 15 ñì.
Íà êîíöàõ ãàéêàìè çàòÿãèâàåì øàðîâûå îïîðû.
Ìîæíî ñðàçó ïðèìåðèòü ïëå÷è. Êàðêàñ ïëå÷à ýòî 40 ñì êóñîê ïðîôèëü 25*25 ñ ïðîäåëàííûì ïîä øàðîâóþ îïîðó îòâåðñòèåì.
Ïëå÷è çàæèìàþòñÿ âîò òàê.

Äàëåå ïî àíàëîãèè ñ çàäíåé æåñòÿíîé ïëàñòèíîé ðåæåì è ñòàâèì ïåðåäíåþ. Êðåïèòñÿ îíà íà òå æå áîëòû ÷òî è çàäíÿÿ, ò.å. ïðîèñõîäèò ñøèâêà 2 ïëàñòèí è êàðêàñà. Åñëè æåñòü íåìíîãî òîð÷èò ýòî íå áåäà áåðåì íàïèëüíèê è ðîâíÿåì.
Äëÿ áåäåð íàì ïîíàäîáèòñÿ 8 êóñêîâ ïðîôèëÿ 15*15 ìì äëèíîé 15 ñì è 2 êóñêà ïðîôèëÿ 20*20 äëèíîé 13 ñì.
Ïðèìåðÿåì 15 ñàíòèìåòðîâûå êóñêè ïî êðàÿì. Ñåé÷àñ äîëæíî áûòü ïðèìåðíî êàê íà ôîòî.
Ñâåðëèì ýòè ýëåìåíòû â êðàÿõ äëÿ ñîåäèíåíèÿ ñ äëèííûì ýëåìåíòîì. ×òîáû ïðîøèòü âñå ýëåìåíòû áîëòàìè íóæíî ïðîñâåðëèòü íàñêâîçü. Ñîåäèíèòü íóæíî â 2 îñÿõ, ò.å. è êàæäûå 2 ýëåìåíòà åù¸ ñîåäèíåíû âäîëü. Ìåæäó óäâîåííûìè ýëåìåíòàìè óñòàíàâëèâàåì 13 ñàíòèìåòðîâûå ýëåìåíòû èç ïðîôèëÿ 20*20 ìì. Íà ýòîì ïîêà ñ áåäðàìè çàêàí÷èâàåì. Ïðîâåðÿåì ÷òîáû âñå áûëî ñîåäèíåíî áîëòàìè è íå ðàçâàëèâàëîñü íà ïðîôèëü 20*20 åù¸ íóæíî áóäåò çàêðåïèòü ïî 2 ìåõàíèçìà ïîäúåìà äâåðè Jet 100N MR203B.100Nl99.
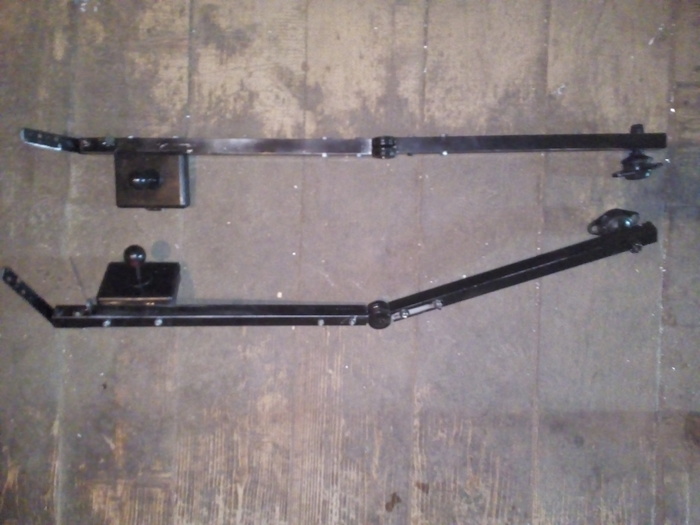
Òåïåðü ñíîâà âåðíåìñÿ ê ïëå÷àì. ×òîáû ñäåëàòü êðåïëåíèå äëÿ ïíåâìîìûøö ìû áåðåì ñòàëüíîé óãîëîê 150*50 ìì è ñâåðëèì â íåì îòâåðñòèÿ òàêîãî æå äèàìåòðà êàê è íàø ïðîôèëü.
Ïðèìåðíî ñ êðàþ è ÷åðåç 10 ñì. Íàêðó÷èâàåì ãàéêè è çàæèìàåì ýòè ýëåìåíòû øàðîâûìè îïîðàìè êàê íà ôîòî. Åñëè çàõî÷åòñÿ çàêðûòü øïèëüêó òî ñàìîå îïòèìàëüíîå âçÿòü ãîôðó äëÿ ïðîâîäîâ. Íà ôîòî îíà ïîêðàøåíà ÷¸ðíûì.

Ñïèíà, ïëå÷è è áåäðà ãîòîâû.
3. Ðóêè
Ðóêè, åñëè ïëå÷è áûëè ãîòîâû íà ïðåäûäóùåì ýòàïå, ýòî ñàìûé ëåãêèé ýëåìåíò ñêåëåòà.
Äëÿ ðóê íàì ïîíàäîáèòñÿ ñëåäóþùåå:
1 ìåòð àëþìèíèåâîãî ïðîôèëÿ 25*25*1 ìì
2 àðêàäíûõ äæîéñòèêà
2 ïëàñòèêîâûõ áîêñà äëÿ ìåëêèõ äåòàëåé
4 ìåõàíèçìà ïîäúåìà äâåðè Jet 100N MR203B.100Nl99
Íà÷èíàåì ñ òîãî ÷òî âûðåçàåì íîæîì âñå ïåðåãîðîäêè â áîêñå. Ýòî íóæíî äëÿ óñòàíîâêè äæîéñòèêîâ. Äîëæíî áûòü ïðèìåðíî âîò òàêîå.

Äàëåå áåðåì äæîéñòèêè è óñòàíàâëèâàåì âíóòðü áîêñà. Çàòÿãèâàåì ïî êðàÿì áîëòàìè.Äîëæíî áûòü âîò òàê. Âìåñòî áîëòîâ ìîæíî ïðîñòî ïðèêëåèòü íà êàêîé-íèáóäü ïðî÷íûé êëåé. Òîãäà áóäåò âîò òàê.

Ñ ïîìîùüþ ýòîãî äæîéñòèêà áóäóò ñðàáàòûâàòü ïðèâîäû íà ðóêàõ. Îí ïîçâîëÿåò óïðàâëÿòü ñðàçó 4 êëàïàíàìè, íî ìû áóäåò èñïîëüçîâàòü òîëüêî ïîëîâèíó êîíòàêòîâ.
Áåðåì ïðîôèëü 25*25 ìì è îòïèëèâàåì 2 êóñêà ïî 40 ñì (èëè ïîäãîíÿåì ïîä íóæíóþ äëèíó ðóê íóæíî áðàòü äëèíó îò ëîêòÿ äî ñåðåäèíû êèñòè).
Áîêñû è ýòè êóñêè ïðîôèëÿ ñâåðëÿòñÿ è ñîåäèíÿòñÿ. Íà ñàìûé êðàé ìîæíî ïðèäåëàòü êàêîé-íèáóäü ìåòàëëè÷åñêèé êðþê èëè, êàê ó ìåíÿ, ïëàñòèíó. Òàê ìîæíî ïðèõâàòûâàòü ãðóç. Äîëæíî ïîëó÷èòñÿ ÷òî-òî òèïà âîò òàêîãî.

Áåðåì ïî 2 ìåõàíèçìà ïîäúåìà äâåðè è ïîïàðíî óñòàíàâëèâàåì èõ íà ëîêòè.

Åñëè ñíÿòü ëîêòè ñ øïèëåê òî äîëæíî áûò ÷òî-òî ïîõîæåå íà âîò ýòî.
4. Ïíåâìàòèêà è ïðîâîäêà
Ïîñëåäíèé øàã â ñáîðêå ñêåëåòà ýòî ñäåëàòü ïíåìîìóñêóëû, ñîåäèíèòü ïíåâìàòèêó è ïðîâåñòè ïðîâîäà îò äæîéñòèêîâ ê êëàïàíàì. Áóäåì äåëàòü ñàìûé ïðîñòîé âàðèàíò áåç ðåñèâåðà è ïèòàíèåì îò âíåøíåãî áëîêà ïèòàíèÿ.
Èç êîìïîíåíòîâ íàì ïîíàäîáèòñÿ ñëåäóþùåå:
4 êëàïàíà ZCQ-20B
3 ìåòðà 5 ìì òðóáêè äëÿ îìûâàòåëÿ ìàøèíû
10 òðîéíèêîâ îò îìûâàòåëÿ ìàøèíû
1 äâóõöèëèíäðîâûé êîìïðåññîð äëÿ íàêà÷êè øèí
4 ñòàíäàðòíûå ïíåìîìóñêóëû íà 0-5 àòì
Íàì íóæíî ñäåëàòü 4 ïíåâìîìóñêóëû ïî ~1 ìåòðó. Èíñòðóêöèé êàê èõ ñäåëàòü î÷åíü ìíîãî è ïåðåñêàçûâàòü òóò ÿ íå âèæó ñìûñëà.
Ñêîðåå âñåãî ýòî áóäåò ïîëíîöåííî îïèñàíî ïîçæå.
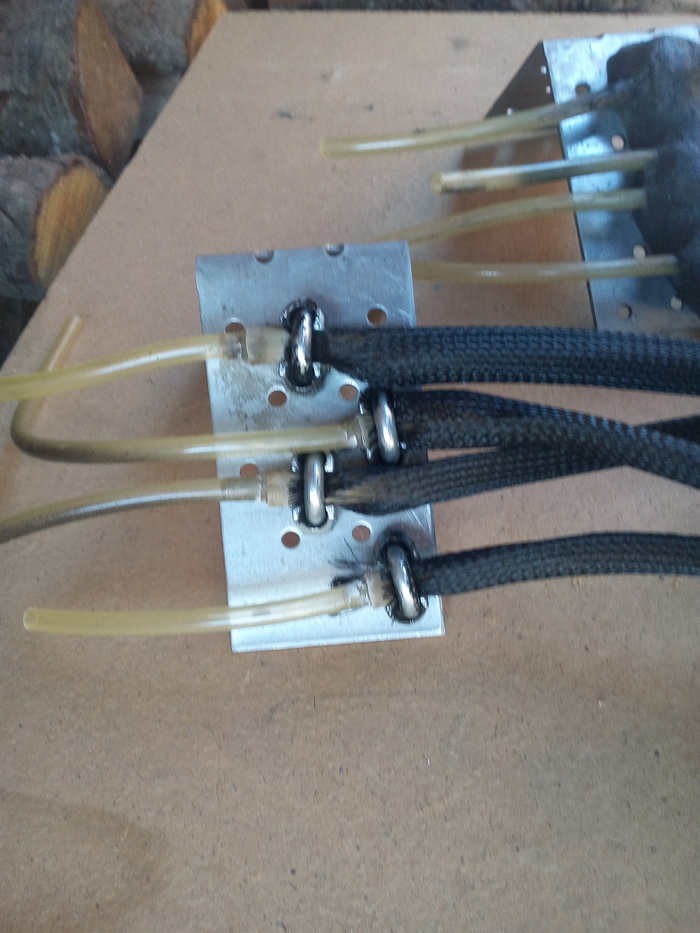
Êðåïèì ìóñêóëû íà ñòàëüíûõ óãîëêàõ 150*50 ñ ïëå÷. Êðåïèì ñ è çàæèìàåì ñ ïîìîùüþ 6 ìì çàæèìîâ äëÿ òðîñîâ.
Ñîáèðàåì ìû âîò ýòîò ýêçîñêåëåò.
ïðîäîëæåíèå ñëåäóåò…
Источник
Киберноги Honda притопали на завод перед визитом в дом престарелых
Когда речь заходит об экзоскелете для нижней части тела, а попросту — о киберштанах, нам почему-то вспоминается мульт «Уоллес и Громит». Одним из творений рассеянного и легкомысленного изобретателя Уоллеса были как раз самоходные портки, с которыми не раз случались забавные казусы: капризная вещица проявляла норов и была способна «прогулять» своего хозяина совсем не туда, куда он хотел бы.

Уоллес и Громит (Wallace and Gromit) на себе испытали, что такое «штаны с характером»
(кадры с сайта animated-views.com).
В каждой шутке, как известно, доля шутки. Соединить несколько «палочек» шарнирами, снабдив их электромоторчиками — дело недолгое. А вот сделать так, чтобы эта конструкция помогала ходьбе, но при этом не стесняла человека, а чутко реагировала на движения, — очень даже непросто.
Богатый опыт постепенного совершенствования «умного» ASIMO, пожалуй, самого сложного ходячего человекоподобного робота на планете, а также собственные исследования по биомеханике человеческой ходьбы позволили компании Honda создать свою версию киберштанов, пользование которыми, как уверяют инженеры, простое и интуитивное.
Компания обнародовала новый силовой экзоскелет для ног в красный день календаря – 7 ноября.
Как и раньше, устройство называется Walking assist device (первый и при этом необычайно портативный «ножной» экзоскелет под таким же именем Honda представила в апреле нынешнего года).
Только теперь к названию прибора добавлено With Bodyweight Support System, читай — с поддержкой пятой точки. И не зря. Фактически перед нами совершенно другая система.
Для надевания Walking assist вовсе не требуется застёгивать вокруг ног или пояса многочисленные ремни, как это было с аппаратами-предшественниками. Достаточно обуться в ботинки (являющиеся частью устройства) да приподнять сиденье, венчающее киберноги, и можно отправляться в путь.
Машина следует за движениями человека, при этом она направляет своё усилие так, чтобы оно проходило через центр тяжести владельца. Это помогает ему держать равновесие. Более того, аппарат учитывает при регулировке усилия различные позы.
Так, во время ходьбы компьютер командует парой электромоторов сообразно сигналам с датчиков в подошвах механизма.
А ещё машина учитывает угол сгибания коленей. Если человек перемещается в полуприседе или поднимается по лестнице, усилие моторов, поддерживающих вес владельца, будет увеличено.
Walking assist на данный момент — это вершина исследований, ведущихся Honda с 1999 года. Главная цель — подарить радость движения старикам, ещё способным ходить, но уже с трудом. А второе предназначение киберштанов — оснащение рабочих на конвейере.
Вот тут, кстати, пригодится и движение вприсядку (в ходе сборки авто куда только не приходится залезать), и помощь при подъёме тяжестей.
Что до ограничения времени активной работы на одной зарядке батареи, полагаем, авторам «усилителя ног» нетрудно будет предусмотреть смену заранее заряженных аккумуляторов или даже переодевание рабочих в новые «штаны» на время заправки первых.
Инженер Honda Дзюн Асихара (Jun Ashihara) считает, что аппарат понравится и тем, кому по долгу службы приходится проходить большие расстояния. «Он должен быть предельно прост в использовании, как велосипед, — говорит Асихара. — Он уменьшает стресс, и вы чувствуете себя менее уставшим».
Во всех случаях владельцы чудо-машинки оценят, насколько она уменьшает нагрузку на мышцы и суставы ног (бёдра, колени, лодыжки).
Как гласит пресс-релиз компании, с нынешнего месяца начинаются испытания Walking assist на автомобильном заводе Honda в Сайяме (Sayama).
Именно сборщики первыми смогут выявить все достоинства и недостатки разработки. Но уже сейчас можно сказать о её главных преимуществах перед аналогами: низкий вес и эстетичность.
Кстати, одним из этих прототипов был японский же костюм HAL. Ныне японская компания Cyberdyne фактически поставила разработку университета Цукубы (Tsukuba University) на поток (страница продукта теперь соответственно — HAL).
Пока — для рынка Японии, но через некоторое время намечен выход в Европу, а потом и в другие части света.
Вот только цена такого костюма сравнима со стоимостью авто бизнес-класса. Он не по карману даже многим госпиталям (а ведь одна из задач экзоскелета — помощь медсёстрам и сиделкам, помогающим, в свою очередь, пациентам).
Потому массовому пользователю недавно была предложена упрощённая версия HAL — только низ. Эти киберштаны компания отдаёт в аренду за $2 тысячи в месяц.
Что дальше? Логичным развитием экзоскелетов можно посчитать разнообразные ходячие кресла, вроде Toyota i-foot или HUBO-FX1.
Красота! Тут совсем напрягаться не нужно.
Но здесь уже и не приходится говорить о компактности механизма. И, скажем, применение подобных штуковин внутри помещений ограничено в силу габаритов ходячих машин. А при поломке такое кресло с собой не унесёшь – это же целое транспортное средство.
Полагаем, развитие «усилителей» мышц должно пойти в противоположную сторону – минимизации. Те же киберштаны со временем, быть может, утончатся настолько, что их можно будет надевать не на, а под штаны обычные.
А главное – поскольку тут нет никакого автономного «самоуправления», с Honda Walking assist device приключения Уоллеса нам не грозят. Посмотрим на них лучше в кино.
Мембрана
Портал «Вечная молодость» www.vechnayamolodost.ru
12.11.2008
Источник
Использование: усиление выходного усилия коленного сустава человека Цель: усиление мышечной силы человека. Сущность полезной модели: Мехатронный модуль включает в себя основание, которое при помощи гибких эластичных ремней крепится к бедру человека. К нижней части основания присоединена с образованием вращательной кинематической пары поворотная пластина, которая с помощью гибких эластичных ремней также крепится к голени ноги человека. К внешней стороне основания присоединен при помощи. сферического шарнира привод поступательного движения, выходной вал которого соединен с поворотной пластиной при помощи сферического шарнира. В нижней части бедра человека, спереди, в районе медиальной широкой мышцы, крепится датчик биологического сигнала, соединенный с системой компьютерного управления по каналам радиосвязи. 1 илл. Положительный эффект: снижение энергопотребления и повышение жесткости костюма для увеличения человеческой силы в районе коленного сустава человека.
Полезная модель относится к устройствам, предназначенным для усиления мышечной силы человека за счет дополнительного внешнего каркаса. Мехатронный модуль повторяет биомеханику коленного сустава человека и применяется для осуществления и пропорционального увеличения выходного усилия в суставе при движении. Данный модуль может использоваться как интегрированным в систему (например, в скафандр, экзоскелет), так и как отдельная единица.
Известен полицентрический бесшарнирный коленный модуль для ортезов и протезов (см. патент на изобретение 2087138, A61F 2/64, 1997), содержащий головки шин бедра и голени, которые жестко связаны между собой с одной стороны эластичным ограничителем, а с другой стороны — упругим элементом, на котором неподвижно установлены съемные упоры-ограничители, количество которых зависит от габаритов и степени поражения коленного сустава.
Недостатком данной конструкции является невозможность увеличения мышечной силы человека.
Наиболее близким, по общей совокупности признаков, к заявляемому модулю является костюм для увеличения человеческой силы (см. Интернет http:/wisecomp.ru/news, публикация от 11.05.2010), содержащее внешний каркас, изготовленный из металла и пластика, и приводимый в действие с помощью восьми электроприводов шарниров в суставах верхних и нижних конечностей.
Недостатком данного костюма для увеличения человеческой силы являются невысокая грузоподъемность из-за недостаточной жесткости устройства и большое потребление энергии электроприводами вращательного движения шарниров в коленях из-за того, что центр масс конструкции расположен далеко от центра вращения шарнира.
Задачей полезной модели является повышение грузоподъемности устройства и снижение энергопотребления приводами шарниров в коленном суставе при движении.
Технический результат достигается путем применения в конструкции устройства мехатронного модуля коленного сустава с приводом поступательного движения, работающего параллельно с коленным суставом человека.
Схема мехатронного модуля коленного сустава для экзоскелета нижних конечностей человека показана на рис. 1.
Мехатронный модуль включает в себя основание 1, которое при помощи гибких эластичных ремней 2 крепится к бедру человека. К нижней части основания 1 присоединена с образованием вращательной кинематической пары поворотная пластина 3, которая с помощью гибких эластичных ремней 2 также крепится к голени ноги человека. В верхней части основания 1 при помощи сферического шарнира присоединен привод поступательного движения 4, выходной вал которого соединен с поворотной пластиной 3 также при помощи сферического шарнира. В нижней части бедра человека, спереди, в районе медиальной широкой мышцы, крепится датчик 5 биологического сигнала, соединенный с системой компьютерного управления (на рисунке не представлена) по каналам радиосвязи.
Работа устройства осуществляется следующим образом.
При попытке человека совершить движение нижней конечностью, от датчика 5 поступает сигнал в систему компьютерного управления, которая в соответствии с заданной программой управления, подает питающее напряжение на привод поступательного движения 4, пропорциональное величине требуемого выходного усилия коленного модуля. Выходной вал привода поступательного движения 4 совершает поступательное перемещение в необходимом направлении, приводя в движение поворотную пластину 3, которая также совершает угловое перемещение вместе с голенью ноги человека. Затем в соответствии с программой управления выходной вал привода поступательного движения 4 движется в обратном направлении и поворотная пластина вместе с голенью человека возвращается в исходное положение. Затем цикл повторяется.
Мехатронный модуль коленного сустава для экзоскелета, включающий в себя основание, к нижней части которого присоединена с образованием вращательной кинематической пары поворотная пластина, отличающийся тем, что к верхней части основания присоединен при помощи сферического шарнира привод поступательного движения, выходной вал которого соединен с поворотной пластиной при помощи сферического шарнира.
Источник